10 parole chiave_bim
INTEROPERABILITA'
DATABASE
CONDIVISIONE
COMPONENTI
ASSEMBLAGGIO
CANTIERE
REALTA'
MODELLO
GESTIONE
CONTROLLO



Attualmente ci sono 0 utenti collegati.
INTEROPERABILITA'
DATABASE
CONDIVISIONE
COMPONENTI
ASSEMBLAGGIO
CANTIERE
REALTA'
MODELLO
GESTIONE
CONTROLLO
TPP_ LA CASA smart_CANALE B_ GIULIA SPAGNUOLO/ 2016
Si vuole progettare una casa mobile prefabbricata, facilmente realizzabile e trasportabile.
Indicata soprattutto per case vacanze, villaggi turistici alberghi ecc.
Ho deciso di concentrarmi sulla modellazione dei diversi tipi di tamponatura opaca e trasparente con definizione dei due tipi di finitura: lamiera grecata e sistema brise soleil.
L’ obiettivo di questo post è quello di progettare un macrocomponente, o meglio una famiglia nidificata (FAMIGLIA PARENT) composta da n. famiglie (FAMIGLIA CHILD) che posso gestire nel progetto.
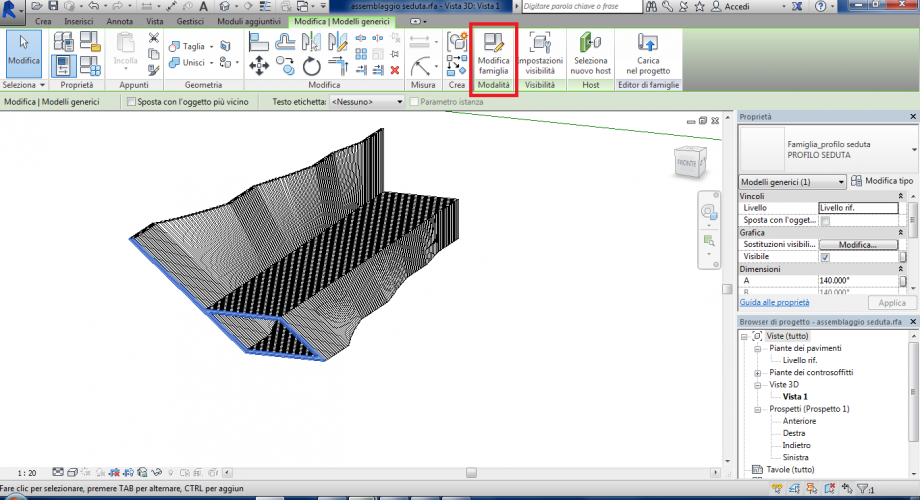
Partendo dalla seduta parametrica (family face based) che ho progettato per la prima consegna: assemblaggio di n. profili in legno soggetti alla variazione parametrica dei 2 angoli: schienale/ seduta e seduta/ poggia gambe, ho deciso di fornire il profilo del componente base di 4 fori (con r=3 cm) in cui alloggiare la “dima” e allo stesso tempo, impilarvisi.
SEDUTA PARAMETRICA ERGONOMICA_PARAMETRI CONDIVISI
Per il primo post ho progettato una seduta parametrica “ergonomica” composta dall’ assemblaggio di una serie di profili /componenti di stesso spessore, materiale e dimensioni (parametri di tipo)e con schienale e "poggia - gambe" di variabile inclinazione/ angolo (parametri di istanza).
Decido di trasmettere al falegname, che dovrà tagliare e assemblare i profili in legno della seduta, i rispettivi angoli di ciascun profilo.
L' intento è quello di creare una seduta ergonomica, con schienale e "poggi gambe" che variassero contemporaneamente inclinazione.
1_ Per prima cosa ho creato una nuova famiglia selezionando metric generic model floor based

2_qui andrò a realizzare il mio oggetto base(componente), procedendo per step:
_ creo dei piani di riferimento con il comando reference plane (RP) che individuano i lati dell’ oggetto che andrò a creare.